- True Redundancy
- – 자율주행을 추구하는 대부분의 기업들은 카메라, 레이더, 라이다(LiDAR) 등 3가지 센서에서 나온 정보를 하나의 센싱 시스템으로 통합해 단일 모델을 구성하는 ‘센서 퓨전(Sensor Fusion)’ 방식으로 연구를 진행하고 있다.
- – 반면 모빌아이의 차별화된 True Redundancy 접근법은 두 가지 병렬 하위 시스템을 갖고 있는데 하나는 카메라만을, 다른 하나는 카메라를 제외하고 라이더와 레이더만을 사용해 각각 독립적으로 작동. 이는 강력하고 효율적인 동시에 핵심 안전장치(failsafe)까지 제공
- – 그러나 더 깊이 나아가 모빌아이는 모회사인 인텔의 전문성을 활용해 보다 비용 효율적이고 보다 진보된 레이더와 라이다를 개발 중이다.
※ 인텔 모빌아이 설명 참고 1. 모빌아이(Mobileye) (1) 기업 개요 – 1999년 설립 이스라엘에서 설립된 비전(Vision) 기반 지능 … blog.naver.com ※ 시리즈로 여러 편으로 나누어 게재할 예정이며, 앞서 게재한 내용과 어느 정도 중복이 있음 4. GM 크루즈(… blog.naver.com
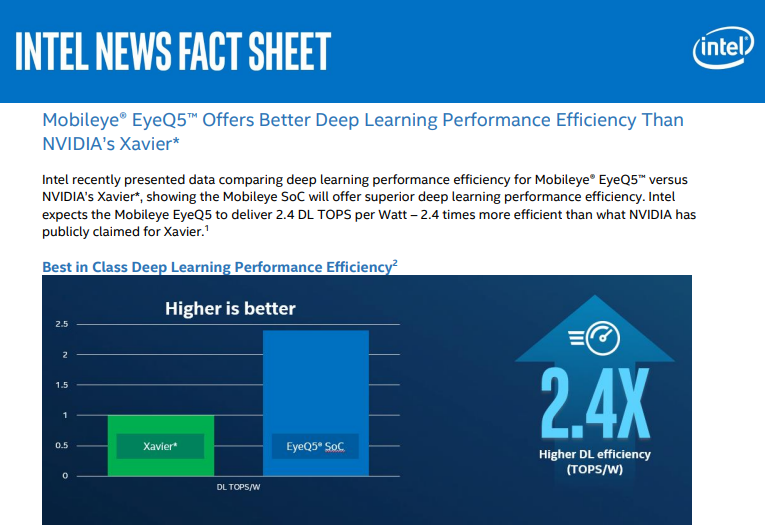
출처 : Mobileye
2. 소프트웨어 정의 디지털 이미징 레이더 (Software-Defined Digital Imaging Radar)
- 모빌아이의 소프트웨어 정의 디지털 이미징 레이더는 기존 아날로그 레이더보다 훨씬 높은 해상도와 동적 범위, 정확도로 진정한 4D 이미징을 제공한다.
- – 이러한 아키텍처 패러다임의 변화는 간섭 문제를 효과적으로 처리하면서 탐지 확률을 높이고 에코 노이즈를 줄여 강한 존재감 대상 사이에서도 약한 존재감 목표물을 잘 인식할 수 있게 한다.
- – 그리고 소프트웨어에 기반한 전용 SoC 알고리즘은 높은 유연성으로 인해 12배 낮은 전력으로도 오히려 해상도를 상승시키며, 이 제품은 진정한 영상 레이더이기 때문에 컴퓨터 비전에 관한 전문 기술을 적용하여 레이더가 탐지하는 것을 처리할 수도 있다.
3. 실리콘 광전자 기반 주파수 변조 연속파 LiDAR(Silicon Photonics-based Frequency-Modulated Continuous Wave LiDAR)
- 라이더 기술에 있어서, 다음 프론티어인 FMCW 라이더는 기존 ToF 라이더 스캐너에 비해 우수한 장점을 제공.라이다의 기능 요소라면 일반적으로 샘플링 범위, 고도 및 방위각 또는 상대 궤적 등이 있는데 FMCW는 여기에 속도를 추가해 센서가 3차원을 넘어 4차원 데이터 처리가 가능해진다.
- – 이를 통해 오토바이와 같이 보다 먼 거리에서 유입되는 작고 빠른 대상을 신속하게 식별하고 검출된 물체의 정보를 보다 안정적으로 측정하며 추가 속도 정보로 AI 알고리즘을 풍부하게 할 수 있다.
- – FMCW 라이더는 또한 햇빛, 반사 및 기타 간섭에 민감하지 않고 짧은 펄스 대신 연속적인 빛 파장을 보내므로 보다 높은 감지 및 효과적인 동적 범위를 달성. 아울러 보다 낮고 안전한 전력 수준에서 동작하며 교통표지판이나 번호판 등 역반사 시 간섭 문제를 최소화한다.
출처 : Mobileye
4) 로드맵
- 모빌아이와 인텔의 결합 경쟁력은 이 같은 복잡한 엔지니어링과 최첨단 액티브 센서 개발을 진행해 시장에 내놓을 수 있도록 한다.
- – 인텔은 이 같은 신제품 능동과 수동 부품을 모두 하나의 칩으로 통합하는 희귀 실리콘 광전자 팹을 개발한 풍부한 경험을 갖고 있다. 그리고 모빌아이는 자동차 애플리케이션과 디지털 이미지 분석에서 입증된 전문성을 갖고 있어 고도로 발전된 자율주행용 센서 구현이 가능하다.
- – 모빌아이에 따르면 자율주행차가 연구를 넘어 정말 폭넓게 채택되려면 비용을 실행 가능한 수준으로 줄여야 한다. 그러나 라이다는 레이더보다 약 10배 높은 가격의 비교적 비싼 센서이며, 이 비용도 매우 빠르게 내려갈 것이라고 생각하지 않는다.
- – 따라서 모빌아이는 전체 비용을 줄이기 위해 라이더에 덜 의존하도록 반대로 레이더 성능을 높이고 있다. 이에 따라 모빌아이 로드맵은 차량 주변 카메라와 디지털 영상 레이더를 통한 360도 커버리지를 목표로 하고 있으며, 매우 높은 해상도의 전면 FMCW 라이더 하나만으로 드라이브 공간을 매핑해 더 먼 곳의 작은 표적을 탐지할 계획이다.
출처 : Mobileye
- 현재 이용 가능한 최고의 레이더와 라이다 센서를 사용하며 모빌아이는 내년 말 자율주행차 플랫폼을 시장에 출시할 예정이다. 우선 온디맨드 자율주행 모빌리티 서비스(on-demand self-driving Mobility-as-a-Service)를 열고 이를 기반으로 2025년께 매스 프로덕트인 소비자 시장에 갈 계획이다.
- – 대신 차세대 레이더와 라이다 센서가 개발됨에 따라 모빌아이는 AV 센싱 제품군 진화를 위한 다음 단계를 우선적으로 주시하고 있다.